#include <Eigen/Core>#include "smooth/version.hpp"
Go to the source code of this file.
Concepts | |
| concept | Manifold |
| Class-external Manifold interface defined through the traits::man trait class. | |
Typedefs | |
| template<Manifold M> | |
| using | Scalar = typename traits::man< M >::Scalar |
| Manifold scalar type. | |
| template<Manifold M> | |
| using | PlainObject = typename traits::man< M >::PlainObject |
| Manifold default type. | |
| template<typename NewScalar , Manifold M> | |
| using | CastT = typename traits::man< M >::template CastT< NewScalar > |
| Cast'ed type. | |
| template<Manifold M> | |
| using | Tangent = Eigen::Vector< Scalar< M >, Dof< M > > |
| Tangent as a Dof-length vector. | |
| template<Manifold M> | |
| using | TangentMap = Eigen::Matrix< Scalar< M >, Dof< M >, Dof< M > > |
| Matrix of size Dof x Dof. | |
| template<Manifold M> | |
| using | Hessian = Eigen::Matrix< Scalar< M >, Dof< M >,(Dof< M > > 0 ? Dof< M > *Dof< M > :-1)> |
| Matrix of size Dof x Dof*Dof. | |
Functions | |
| template<Manifold M> | |
| PlainObject< M > | Default (Eigen::Index dof) |
| Default-initialized Manifold. | |
| template<Manifold M> requires (Dof<M> > 0) | |
| PlainObject< M > | Default () |
| Default-initialized Manifold with static dof. | |
| template<Manifold M> | |
| Eigen::Index | dof (const M &m) |
| Manifold degrees of freedom (tangent space dimension) | |
| template<typename NewScalar , Manifold M> | |
| CastT< NewScalar, M > | cast (const M &m) |
| Cast to different scalar type. | |
| template<Manifold M, typename Derived > | |
| PlainObject< M > | rplus (const M &m, const Eigen::MatrixBase< Derived > &a) |
| Manifold right-plus. | |
| template<Manifold M, Manifold Mo> | |
| Tangent< M > | rminus (const M &g1, const Mo &g2) |
| Manifold right-minus. | |
Detailed Description
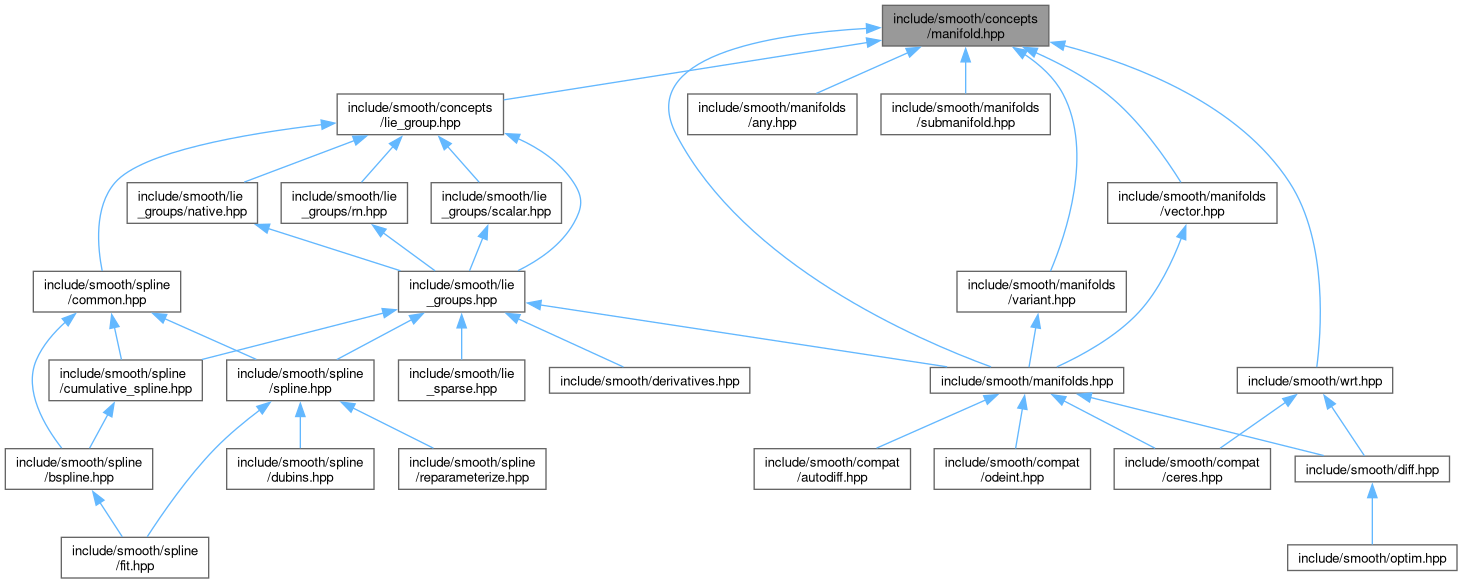
Manifold interface and free Manifold functions.
Definition in file manifold.hpp.
Typedef Documentation
◆ CastT
| using CastT = typename traits::man<M>::template CastT<NewScalar> |
Cast'ed type.
Definition at line 100 of file manifold.hpp.
◆ Hessian
| using Hessian = Eigen::Matrix<Scalar<M>, Dof<M>, (Dof<M> > 0 ? Dof<M> * Dof<M> : -1)> |
Matrix of size Dof x Dof*Dof.
Definition at line 118 of file manifold.hpp.
◆ PlainObject
| using PlainObject = typename traits::man<M>::PlainObject |
Manifold default type.
Definition at line 94 of file manifold.hpp.
◆ Scalar
| using Scalar = typename traits::man<M>::Scalar |
Manifold scalar type.
Definition at line 88 of file manifold.hpp.
◆ Tangent
Tangent as a Dof-length vector.
Definition at line 106 of file manifold.hpp.
◆ TangentMap
| using TangentMap = Eigen::Matrix<Scalar<M>, Dof<M>, Dof<M> > |
Matrix of size Dof x Dof.
Definition at line 112 of file manifold.hpp.
Function Documentation
◆ cast()
Cast to different scalar type.
Definition at line 154 of file manifold.hpp.
◆ Default() [1/2]
requires (Dof<M> > 0)
|
inline |
Default-initialized Manifold with static dof.
Definition at line 135 of file manifold.hpp.
◆ Default() [2/2]
|
inline |
Default-initialized Manifold.
Definition at line 126 of file manifold.hpp.
◆ dof()
|
inline |
Manifold degrees of freedom (tangent space dimension)
Definition at line 145 of file manifold.hpp.
◆ rminus()
Manifold right-minus.
Definition at line 172 of file manifold.hpp.
◆ rplus()
|
inline |
Manifold right-plus.
Definition at line 163 of file manifold.hpp.