Formulate optimal control problem as a nonlinear program. More...
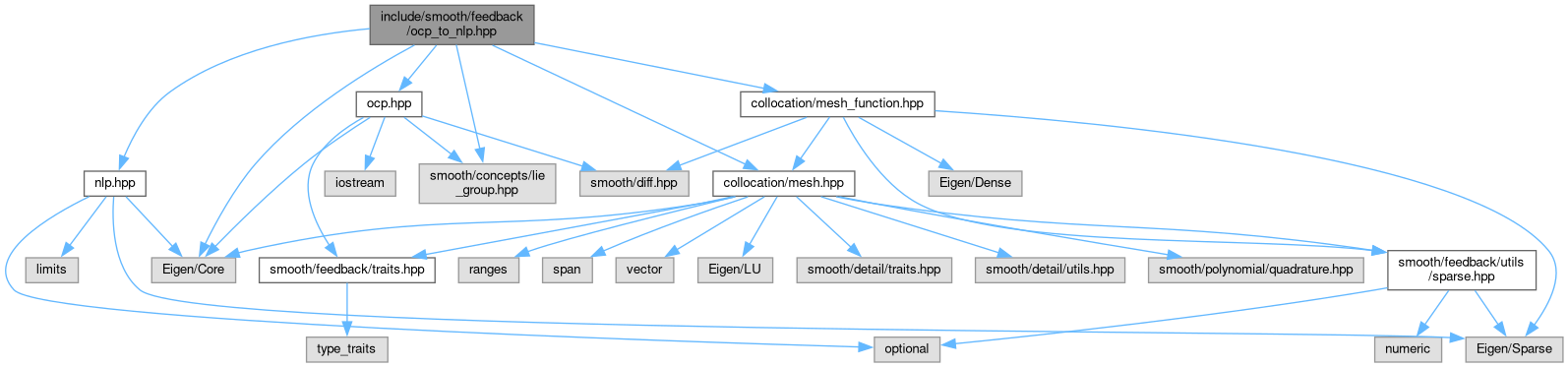
#include <Eigen/Core>#include <smooth/concepts/lie_group.hpp>#include "collocation/mesh.hpp"#include "collocation/mesh_function.hpp"#include "nlp.hpp"#include "ocp.hpp"
Include dependency graph for ocp_to_nlp.hpp:
Go to the source code of this file.
Functions | |
| template<diff::Type DT = diff::Type::Default> | |
| auto | smooth::feedback::ocp_to_nlp (FlatOCPType auto &&ocp, MeshType auto &&mesh) -> detail::OCPNLP< std::decay_t< decltype(ocp)>, std::decay_t< decltype(mesh)>, DT > |
| Formulate an OCP as a NLP using collocation on a Mesh. More... | |
| auto | smooth::feedback::nlpsol_to_ocpsol (const FlatOCPType auto &ocp, const MeshType auto &mesh, const NLPSolution &nlp_sol) |
| Convert nonlinear program solution to ocp solution. More... | |
| NLPSolution | smooth::feedback::ocpsol_to_nlpsol (const FlatOCPType auto &ocp, const MeshType auto &mesh, const auto &ocpsol) |
| Convert ocp solution to nonlinear program solution. More... | |
Detailed Description
Formulate optimal control problem as a nonlinear program.
Definition in file ocp_to_nlp.hpp.
Function Documentation
◆ nlpsol_to_ocpsol()
| auto smooth::feedback::nlpsol_to_ocpsol | ( | const FlatOCPType auto & | ocp, |
| const MeshType auto & | mesh, | ||
| const NLPSolution & | nlp_sol | ||
| ) |
Convert nonlinear program solution to ocp solution.
Definition at line 442 of file ocp_to_nlp.hpp.
◆ ocp_to_nlp()
template<diff::Type DT = diff::Type::Default>
| auto smooth::feedback::ocp_to_nlp | ( | FlatOCPType auto && | ocp, |
| MeshType auto && | mesh | ||
| ) | -> detail::OCPNLP<std::decay_t<decltype(ocp)>, std::decay_t<decltype(mesh)>, DT> |
Formulate an OCP as a NLP using collocation on a Mesh.
- Parameters
-
ocp Optimal control problem definition mesh collocation point structure
- Returns
- encoding of ocp as a nonlinear program
- See also
- ocpsol_to_nlpsol(), nlpsol_to_ocpsol()
Definition at line 432 of file ocp_to_nlp.hpp.
◆ ocpsol_to_nlpsol()
| NLPSolution smooth::feedback::ocpsol_to_nlpsol | ( | const FlatOCPType auto & | ocp, |
| const MeshType auto & | mesh, | ||
| const auto & | ocpsol | ||
| ) |
Convert ocp solution to nonlinear program solution.
- Note
- Allocates memory for return type.
Definition at line 515 of file ocp_to_nlp.hpp.