Formulate optimal control problem as a quadratic program. More...
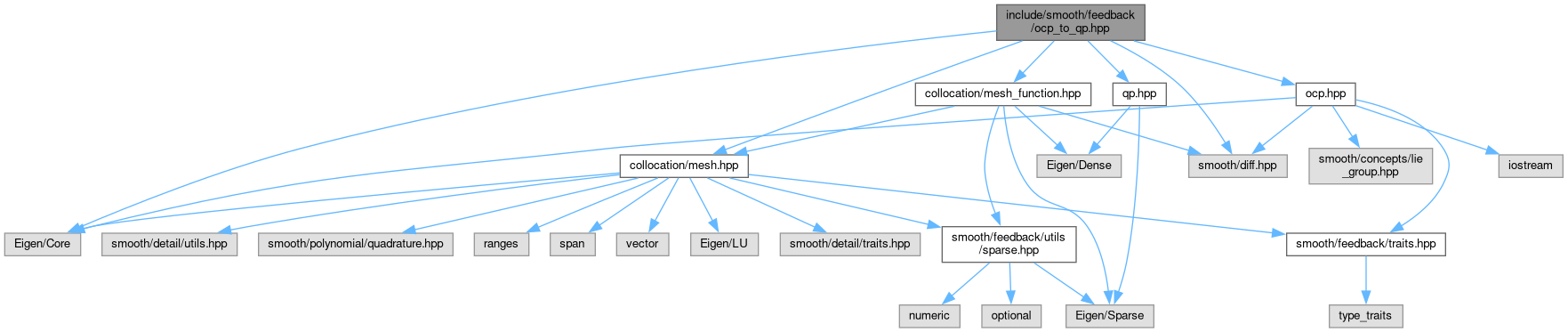
#include <Eigen/Core>#include <smooth/diff.hpp>#include "collocation/mesh.hpp"#include "collocation/mesh_function.hpp"#include "ocp.hpp"#include "qp.hpp"
Include dependency graph for ocp_to_qp.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Functions | |
| template<diff::Type DT = diff::Type::Default> | |
| QuadraticProgramSparse< double > | smooth::feedback::ocp_to_qp (const OCPType auto &ocp, const MeshType auto &mesh, double tf, auto &&xl_fun, auto &&ul_fun) |
| Formulate an optimal control problem as a quadratic program via linearization. More... | |
| auto | smooth::feedback::qpsol_to_ocpsol (const OCPType auto &ocp, const MeshType auto &mesh, const QPSolution<-1, -1, double > &qpsol, double tf, auto &&xl_fun, auto &&ul_fun) |
| Convert QP solution to OCP solution. More... | |
Detailed Description
Formulate optimal control problem as a quadratic program.
Definition in file ocp_to_qp.hpp.
Function Documentation
◆ ocp_to_qp()
template<diff::Type DT = diff::Type::Default>
| QuadraticProgramSparse< double > smooth::feedback::ocp_to_qp | ( | const OCPType auto & | ocp, |
| const MeshType auto & | mesh, | ||
| double | tf, | ||
| auto && | xl_fun, | ||
| auto && | ul_fun | ||
| ) |
Formulate an optimal control problem as a quadratic program via linearization.
/**
- Parameters
-
ocp input problem mesh time discretization tf time horizon xl_fun state linearization (must be differentiable w.r.t. time) ul_fun input linearization
- Returns
- sparse quadratic program for a flattened formulation of ocp.
- Note
- allocates memory for each call. To reduce memory allocation for repeated calls, see ocp_to_qp_allocate() and ocp_to_qp_update().
- See also
- qpsol_to_ocpsol()
Definition at line 423 of file ocp_to_qp.hpp.
◆ qpsol_to_ocpsol()
| auto smooth::feedback::qpsol_to_ocpsol | ( | const OCPType auto & | ocp, |
| const MeshType auto & | mesh, | ||
| const QPSolution<-1, -1, double > & | qpsol, | ||
| double | tf, | ||
| auto && | xl_fun, | ||
| auto && | ul_fun | ||
| ) |
Convert QP solution to OCP solution.
If qp_sol solves a QP obtained via ocp_to_qp(), then qpsol_to_ocpsol(qp_sol) is the corrensponding OCP solution.
- Parameters
-
ocp optimal control problem mesh discretization mesh qpsol solution to quadratic program obtained via ocp_to_qp() tf final time used in ocp_to_qp() xl_fun state linearization trajectory used in ocp_to_qp() ul_fun input linearization trajectory used in ocp_to_qp()
- See also
- ocp_to_qp()
Definition at line 452 of file ocp_to_qp.hpp.