Evaluation of cumulative Lie group splines. More...
#include <cassert>#include <optional>#include "../detail/traits.hpp"#include "../lie_groups.hpp"#include "../polynomial/basis.hpp"#include "common.hpp"#include "detail/cumulative_spline_impl.hpp"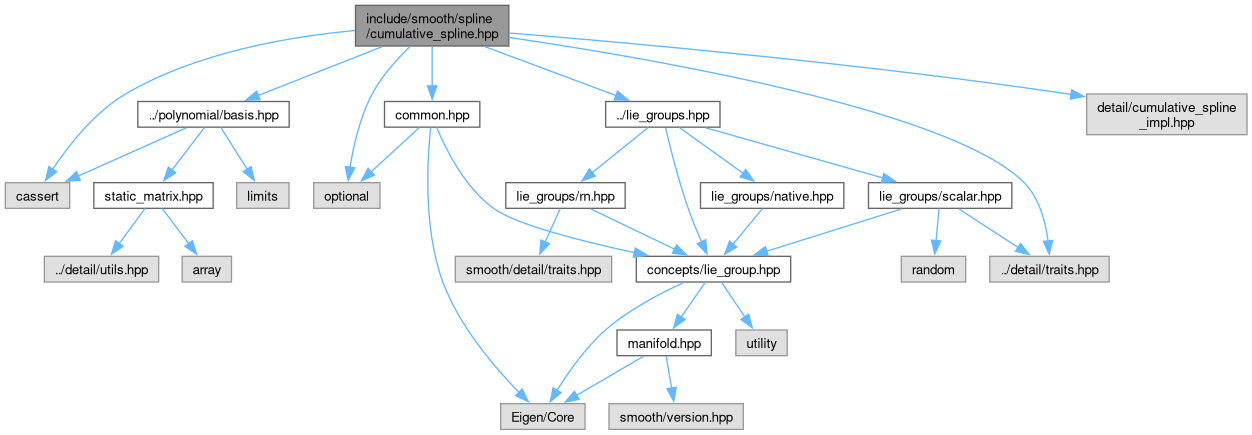
Go to the source code of this file.
Functions | |
| template<int K, LieGroup G> requires (K > 0) | |
| SMOOTH_BEGIN_NAMESPACE G | cspline_eval_vs (std::ranges::sized_range auto &&vs, const MatrixType auto &Bcum, Scalar< G > u, OptTangent< G > vel={}, OptTangent< G > acc={}, OptTangent< G > jer={}) noexcept |
| Evaluate a cumulative spline of order \(K\) from differences. | |
| template<int K, LieGroup G> requires (K > 0) | |
| SplineJacobian< G, K - 1 > | cspline_eval_dg_dvs (std::ranges::sized_range auto &&vs, const MatrixType auto &Bcum, const Scalar< G > &u, OptSplineJacobian< G, K - 1 > dvel_dvs={}, OptSplineJacobian< G, K - 1 > dacc_dvs={}) noexcept |
| Derivatives of a cumulative spline w.r.t. the differences. | |
| template<int K, std::ranges::sized_range R, LieGroup G = std::ranges::range_value_t<R>> requires (K > 0) | |
| G | cspline_eval_gs (R &&gs, const MatrixType auto &Bcum, Scalar< G > u, OptTangent< G > vel={}, OptTangent< G > acc={}, OptTangent< G > jer={}) noexcept |
| Evaluate a cumulative basis spline of order K from coefficients. | |
| template<int K, std::ranges::sized_range R, LieGroup G = std::ranges::range_value_t<R>> requires (K > 0) | |
| SplineJacobian< G, K > | cspline_eval_dg_dgs (R &&gs, const MatrixType auto &Bcum, const Scalar< G > &u, OptSplineJacobian< G, K > dvel_dgs={}, OptSplineJacobian< G, K > dacc_dgs={}) noexcept |
| Derivatives of a cumulative spline w.r.t. the coefficients. | |
Detailed Description
Evaluation of cumulative Lie group splines.
Definition in file cumulative_spline.hpp.
Function Documentation
◆ cspline_eval_dg_dgs()
requires (K > 0)
|
noexcept |
Derivatives of a cumulative spline w.r.t. the coefficients.
\[ \mathrm{d}^r \left( \prod_{i=1}^{K} \exp ( \tilde B_i(u) * v_i ) \right)_{g_0, \ldots, g_k} \]
where \( \tilde B_i \) are cumulative basis functins and \( v_i = g_i - g_{i-1} \).
- Template Parameters
-
K spline order (number of basis functions)
- Parameters
-
[in] gs LieGroup control points \( g_0, g_1, \ldots, g_K \) (must be of size K + 1) [in] Bcum matrix of cumulative base coefficients (size K+1 x K+1) [in] u time point to evaluate spline at (clamped to [0, 1]) [out] dvel_dgs derivatives of velocity w.r.t. gs [out] dacc_dgs derivatives of acceleration w.r.t. gs
- Returns
- dg_dgs derivatives of value w.r.t. gs
◆ cspline_eval_dg_dvs()
requires (K > 0)
|
noexcept |
Derivatives of a cumulative spline w.r.t. the differences.
\[ \mathrm{d}^r \left( \prod_{i=1}^{K} \exp ( \tilde B_i(u) * v_i ) \right)_{v_1, \ldots, v_k} \]
where \( \tilde B_i \) are cumulative basis functins and \( v_i = g_i - g_{i-1} \).
- Template Parameters
-
K spline order (number of basis functions) G lie group type
- Parameters
-
[in] vs range of differences v_i (must be of size K) [in] Bcum matrix of cumulative base coefficients (size K+1 x K+1) [in] u time point to evaluate spline at (clamped to [0, 1]) [out] dvel_dvs derivatives of velocity w.r.t. vs [out] dacc_dvs derivatives of acceleration w.r.t. vs
- Returns
- dg_dvs derivatives of value w.r.t. vs
◆ cspline_eval_gs()
requires (K > 0)
|
inlinenoexcept |
Evaluate a cumulative basis spline of order K from coefficients.
\[ g = g_0 * \prod_{i=1}^{K} \exp ( \tilde B_i(u) * v_i ), \]
where \( \tilde B \) are cumulative basis functions and \( v_i = g_i - g_{i-1} \).
- Template Parameters
-
K spline order
- Parameters
-
[in] gs LieGroup control points \( g_0, g_1, \ldots, g_K \) (must be of size K + 1) [in] Bcum matrix of cumulative base coefficients (size K+1 x K+1) [in] u time point to evaluate spline at (clamped to [0, 1]) [out] vel calculate first order derivative w.r.t. u [out] acc calculate second order derivative w.r.t. u [out] jer calculate third order derivative w.r.t. u
◆ cspline_eval_vs()
requires (K > 0)
|
inlinenoexcept |
Evaluate a cumulative spline of order \(K\) from differences.
\[ g = \prod_{i=1}^{K} \exp ( \tilde B_i(u) * v_i ) \]
- Template Parameters
-
K spline order (number of basis functions) G lie group type
- Parameters
-
[in] vs range of differences v_i (must be of size K) [in] Bcum matrix of cumulative base coefficients (size K+1 x K+1) [in] u time point to evaluate spline at (clamped to [0, 1]) [out] vel calculate first order derivative w.r.t. u [out] acc calculate second order derivative w.r.t. u [out] jer calculate third order derivative w.r.t. u
- Returns
- g