Various useful derivatives. More...
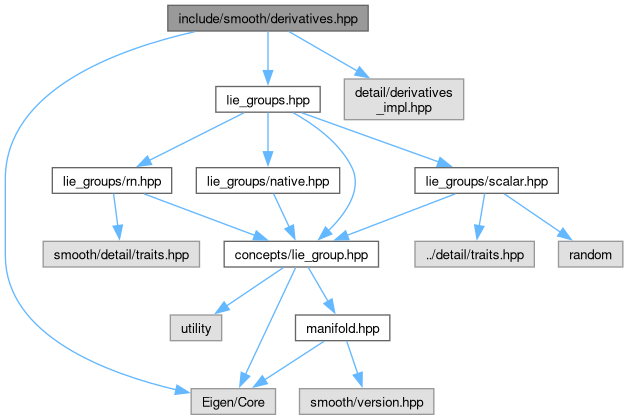
Include dependency graph for derivatives.hpp:
Go to the source code of this file.
Functions | |
| template<typename At , typename dAt , typename Bt , typename dBt > | |
| SMOOTH_BEGIN_NAMESPACE auto | d_matrix_product (const At &A, const dAt &dA, const Bt &B, const dBt &dB) |
| Derivative of matrix product. | |
| template<typename JfT , typename HfT , typename JgT , typename HgT > | |
| auto | d2_fog (const JfT &Jf, const HfT &Hf, const JgT &Jg, const HgT &Hg) |
| Hessian of composed function \( (f \circ g)(x) \). | |
| template<LieGroup G> | |
| TangentMap< G > | dr_rminus (const Tangent< G > &e) |
| Jacobian of rminus. | |
| template<LieGroup G> | |
| Hessian< G > | d2r_rminus (const Tangent< G > &e) |
| Hessian of rminus. | |
| template<LieGroup G> | |
| Eigen::RowVector< Scalar< G >, Dof< G > > | dr_rminus_squarednorm (const Tangent< G > &e) |
| Jacobian of the squared norm of rminus. | |
| template<LieGroup G> | |
| Eigen::Matrix< Scalar< G >, Dof< G >, Dof< G > > | d2r_rminus_squarednorm (const Tangent< G > &e) |
| Hessian of the squared norm of rminus. | |
Detailed Description
Various useful derivatives.
Definition in file derivatives.hpp.
Function Documentation
◆ d2_fog()
template<typename JfT , typename HfT , typename JgT , typename HgT >
| auto d2_fog | ( | const JfT & | Jf, |
| const HfT & | Hf, | ||
| const JgT & | Jg, | ||
| const HgT & | Hg | ||
| ) |
Hessian of composed function \( (f \circ g)(x) \).
- Parameters
-
Jf Jacobian of f at y = g(x) [No x Ny ] Hf Hessian of f at y = g(x) [Ny x No*Ny] Jg Jacobian of g at x [Ny x Nx ] Hg Hessian of g at x [Nx x Ny*Nx]
- Returns
- Hessian of size [No x No*Nx]
◆ d2r_rminus()
Hessian of rminus.
- Parameters
-
e value of \( x \ominus_r y \)
- Returns
- \( \mathrm{d}^{2r} (x \ominus_r y)_{xx} \)
◆ d2r_rminus_squarednorm()
template<LieGroup G>
| Eigen::Matrix< Scalar< G >, Dof< G >, Dof< G > > d2r_rminus_squarednorm | ( | const Tangent< G > & | e | ) |
Hessian of the squared norm of rminus.
- Parameters
-
e value of \( x \ominus_r y \)
- Returns
- \( \mathrm{d}^{2r} \left( \frac{1}{2} \| x \ominus_r y \|^2 \right)_{xx} \)
◆ d_matrix_product()
template<typename At , typename dAt , typename Bt , typename dBt >
| SMOOTH_BEGIN_NAMESPACE auto d_matrix_product | ( | const At & | A, |
| const dAt & | dA, | ||
| const Bt & | B, | ||
| const dBt & | dB | ||
| ) |
Derivative of matrix product.
- Parameters
-
A matrix [N x K] dA derivative of A on horizontal Hessian form [K x N*Nvar] B matrix [K x M] dB derivative of B on horizontal Hessian form [M x K*Nvar]
- Returns
- derivative of A * B on horizontal Hessian form
◆ dr_rminus()
template<LieGroup G>
| TangentMap< G > dr_rminus | ( | const Tangent< G > & | e | ) |
Jacobian of rminus.
- Parameters
-
e value of \( x \ominus_r y \)
- Returns
- \( \mathrm{d}^{r} (x \ominus_r y)_{x} \)