Differentiation on Manifolds. More...
Go to the source code of this file.
Enumerations | |
| enum class | diff::Type { Numerical , Autodiff , Ceres , Analytic , Default } |
| Available differentiation methods. More... | |
Functions | |
| template<std::size_t K, Type D> | |
| auto | diff::dr (auto &&f, auto &&x) |
| Differentiation in tangent space. | |
| template<std::size_t K, Type D, std::size_t... Idx> | |
| auto | diff::dr (auto &&f, auto &&x, std::index_sequence< Idx... > idx) |
| Differentiation in tangent space. | |
| template<std::size_t K> | |
| auto | diff::dr (auto &&f, auto &&x) |
| Differentiation in tangent space using default method. | |
| template<std::size_t K, std::size_t... Idx> | |
| auto | diff::dr (auto &&f, auto &&x, std::index_sequence< Idx... > idx) |
| Differentiation in tangent space using default method. | |
Detailed Description
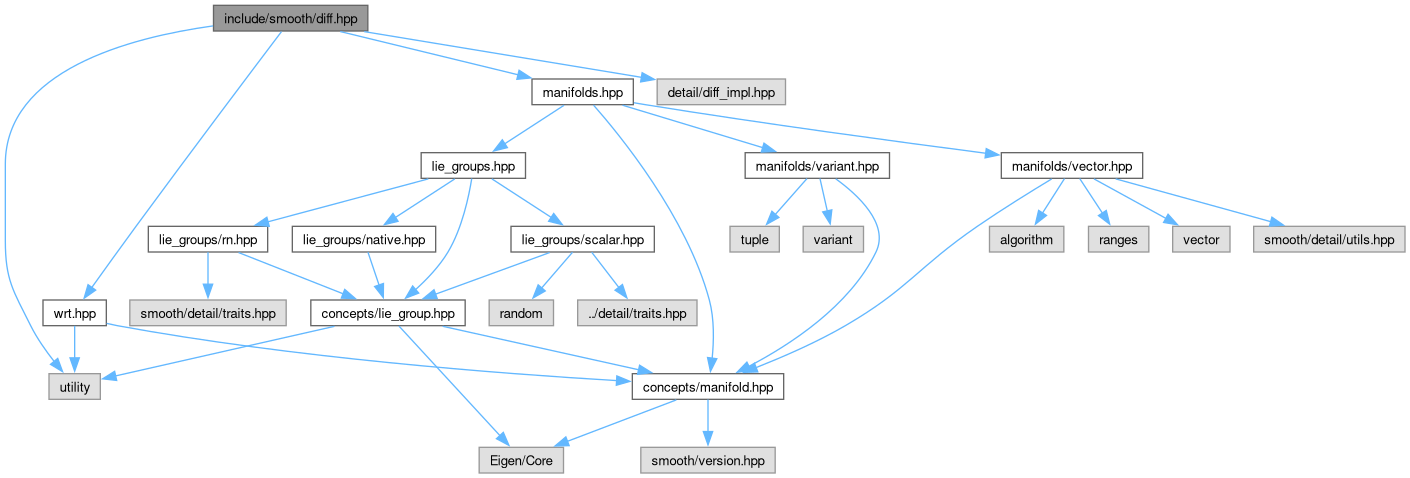
Differentiation on Manifolds.
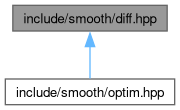
Definition in file diff.hpp.
Enumeration Type Documentation
◆ Type
|
strong |
Available differentiation methods.
| Enumerator | |
|---|---|
| Numerical | Numerical (forward) derivatives. |
| Autodiff | Uses the autodiff (https://autodiff.github.io) library; requires |
| Ceres | Uses the Ceres (http://ceres-solver.org) built-in autodiff; requires |
| Analytic | Hand-coded derivative. Type must have a function named 'jacobian' : x -> Mat (order 1) and 'hesssian': x -> Mat (order 2) that compute the derivatives. |
| Default | Select based on availability (Analytic > Autodiff > Ceres > Numerical) |
Function Documentation
◆ dr() [1/4]
| auto diff::dr | ( | auto && | f, |
| auto && | x | ||
| ) |
Differentiation in tangent space.
- Template Parameters
-
K differentiation order (0, 1 or 2) D differentiation method to use
First derivatives are returned as a matrix df s.t. df(i, j) = dfi / dxj, where fi is the i:th degree of freedom of f, and xj the j:th degree of freedom of x.
Second derivatives are stored as a horizontally stacked block matrix d2f = [ d2f0 d2f1 ... d2fN ], where d2fi(j, k) = d2fi / dxjxk is the Hessian of the i:th degree of freedom of f.
- Parameters
-
f function to differentiate x reference tuple of function arguments
- Returns
- {f(x)} for K = 0, {f(x), dr f(x)} for K = 1, {f(x), dr f(x), d2r f(x)} for K = 2
- Note
- Only scalar functions suppored for K = 2
- All arguments in x as well as the return type \(f(x)\) must satisfy the Manifold concept.
◆ dr() [2/4]
| auto diff::dr | ( | auto && | f, |
| auto && | x | ||
| ) |
Differentiation in tangent space using default method.
- Template Parameters
-
K differentiation order
- Parameters
-
f function to differentiate x reference tuple of function arguments
- Returns
std::paircontaining value and right derivative: \((f(x), \mathrm{d}^r f_x)\)
- Note
- All arguments in x as well as the return type \(f(x)\) must satisfy the Manifold concept.
◆ dr() [3/4]
| auto diff::dr | ( | auto && | f, |
| auto && | x, | ||
| std::index_sequence< Idx... > | idx | ||
| ) |
Differentiation in tangent space.
Like above, but calculate a subset idx of derivatives.
- Parameters
-
f function to differentiate x reference tuple of function arguments idx indices defining subset of x
◆ dr() [4/4]
| auto diff::dr | ( | auto && | f, |
| auto && | x, | ||
| std::index_sequence< Idx... > | idx | ||
| ) |
Differentiation in tangent space using default method.
Like above, but calculate a subset idx of derivatives.
- Parameters
-
f function to differentiate x reference tuple of function arguments idx indices defining subset of x