ROS message compatablity header. More...
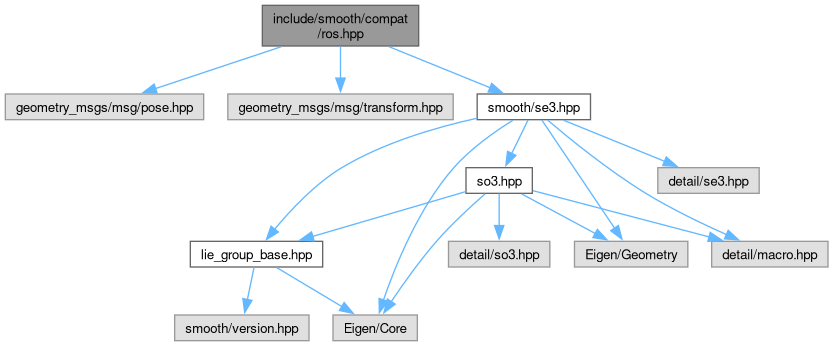
#include <geometry_msgs/msg/pose.hpp>#include <geometry_msgs/msg/transform.hpp>#include "smooth/se3.hpp"
Include dependency graph for ros.hpp:
Go to the source code of this file.
Macros | |
| #define | CREATE_MAPS(DATATYPE, LIETYPE, BASETYPE) |
| Map message DATATYPE as implementation LIETYPE with CRTP base BASETYPE. | |
Detailed Description
ROS message compatablity header.
Definition in file ros.hpp.